Writing a gear torque calculator
While utilizing a stepper motor and gears. I needed more torque and different sized gears. So I wrote a small gear torque calculator.
Recently I ran into the problem of my stepper motor not able to produce enough torque. This is even after adding some gears I found on Thingverse based on Wades Extruder used in 3D printing.
In a previous post previous post I talk about driving a stepper motor with a microcontroller.
The main components are.
After field-testing the motor I found it does not have enough torque for my application.
The cool thing about the previously mentioned gear models is they come with
.scad files so they can be opened in OpenCAD to make larger/smaller or adjust
tooth count.
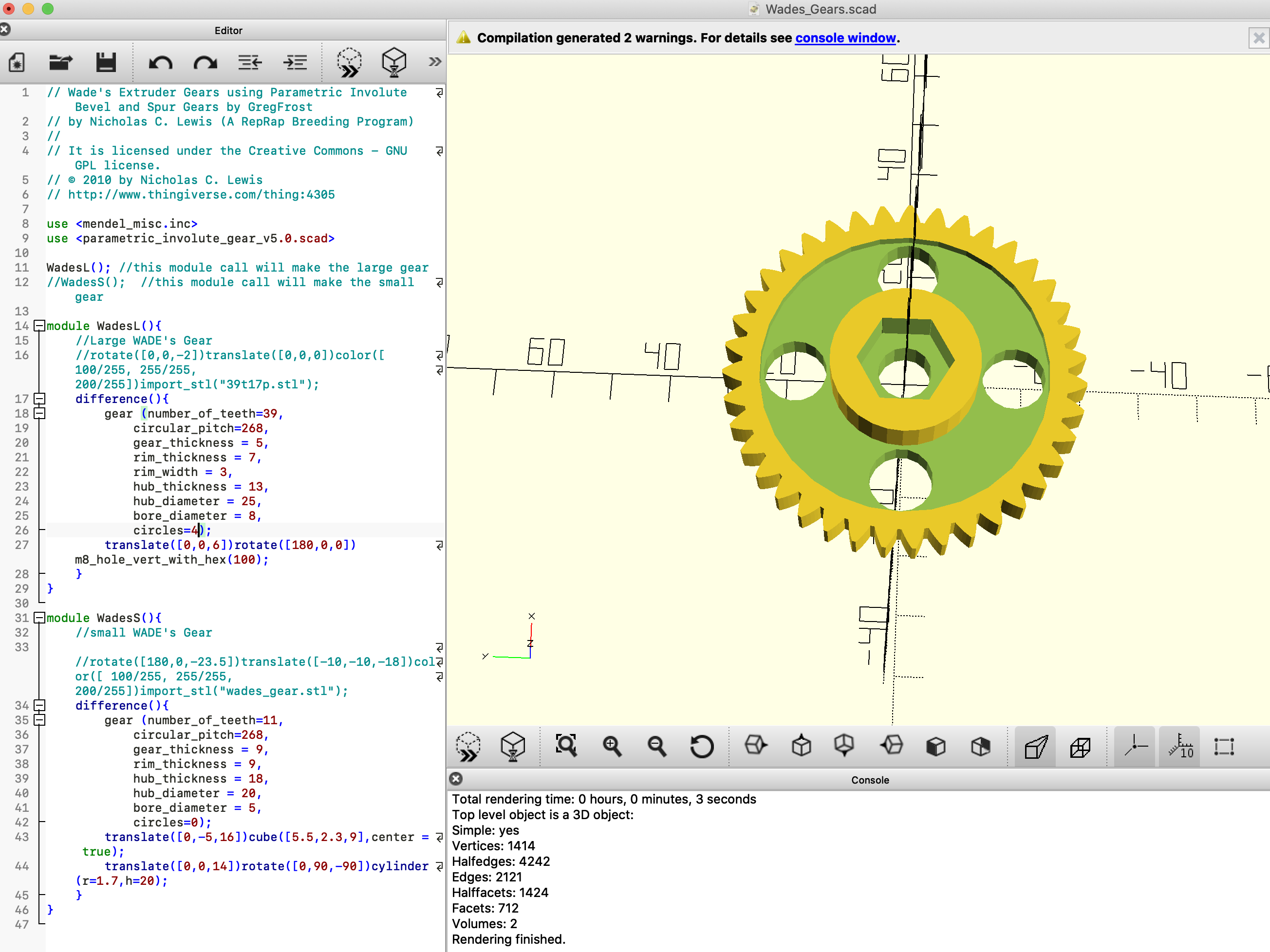
The code for the large gear for example looks like this.
module WadesL(){
difference(){
gear (number_of_teeth=39,
circular_pitch=400,
gear_thickness = 5,
rim_thickness = 7,
rim_width = 3,
hub_thickness = 13,
hub_diameter = 25,
bore_diameter = 8,
circles=4);
translate([0,0,6])rotate([180,0,0])m8_hole_vert_with_hex(100);
}
}This is the moment I started to realize I need to brush up the relationship between torque and gearing. Rather than guessing if a bigger motor or gear would be sufficient I decided to write a small python library to pass different sized gears and figure out the final torque.
The source can be found on Github here, the Python package can be found here
Usage is as follows.
from gear_torque_calc import get_torque
import pprint
pp = pprint.PrettyPrinter()
res = get_torque(drive_shaft_diameter=5, drive_shaft_torque=.2, gear_small_diameter=15, gear_large_diameter=55)
pp.pprint(res)
res = get_torque(drive_shaft_diameter=5, drive_shaft_torque=.2, gear_small_diameter=15, gear_large_diameter=55*2)
pp.pprint(res)This should give you the following output
{'gear_ratio': 7.333333333333333,
'large_gear': {'force': 26.666666666666668,
'radius': 55.0,
'torque': 1.4666666666666668},
'motor': {'force': 80.0, 'torque': 0.2},
'small_gear': {'force': 26.666666666666668, 'radius': 7.5, 'torque': 0.2}}
{'gear_ratio': 3.6666666666666665,
'large_gear': {'force': 26.666666666666668,
'radius': 27.5,
'torque': 0.7333333333333334},
'motor': {'force': 80.0, 'torque': 0.2},
'small_gear': {'force': 26.666666666666668, 'radius': 7.5, 'torque': 0.2}}We can now see doubling the large gear doubles our torque.